Du mardi au samedi de 10h à 18h au :
+33 (0)1 46 20 42 42
info@discount-marine.com
Votre panier est vide
A l'occasion du mois du NMEA2000 sur la boutique Discount Marine, et de l'article paru dans Voiles et Voiliers sur le sujet, j'ai voulu refaire un point plus abouti sur ce nouveau protocole NMEA2k.
Il en a largement été question ici, et pour cause, ce nouveau protocole NMEA2000 révolutionne la façon de penser l’électronique à bord. Les limites du NMEA0183 étant largement atteinte depuis plusieurs années, le protocole NMEA2000 devrait s’installer rapidement et permettre le développement de schémas électroniques "fiabilisés", optimisés et simplifiés sur nos bateaux. Inspiré du protocole CANet utilisé dans l’automobile depuis quelques années, il a vite été repris par les motoristes afin de faciliter l’auto-diagnostique de nos moteurs. NAVMAN fut le premier à proposer un GPS lecteur de carte capable d’afficher les informations délivrées par les capteurs électroniques des moteurs Mercury. Aujourd’hui, pratiquement toutes les marques ont adopté le système NMEA2000 comparable.
Le consortium de fabricants d’électronique marine NMEA (National Marine Electronics Association) dont la mission est de marqueter des solutions industrielles dans le nautisme, à donc mis au point ce nouveau langage de communication corrigeant les défauts du NMEA0183, mais apportant également d’infinies possibilités. Les défauts du NMEA0183 sont légions : vitesse de transmission faible, aucun standard de connexion, problème de duplexage du signal, problème d’interprétation de la norme par les différentes marques, etc. Le défi est de taille pour le NMEA2000, mais après les premiers essais, il est déjà atteint, le NMEA0183 est mort !
La première étape avant de vérifier si votre capteur affiche l’information sur votre écran, c’est le câblage. Le standard NMEA2000 est défini non seulement par le protocole utilisé pour faire circuler l’information, mais également par la connectique. Fini les borniers, aujourd’hui le NMEA2000 se « connecte et marche » (plug and play) à l’aide de connecteur étanche Micro-C.
Le principe est simple, une ligne dorsale (backbone) circule tout au long du bateau, elle est terminé par des bouchons, des résistances permettant de boucler le réseau. A chaque endroit nécessitant la pose d’un capteur, ou d’un afficheur, un « connecteur en T » viendra se prendre sur cette dorsale, et le capteur ou l’écran pourront être ajouté ! En plus de l’information, circule le courant d’alimentation pour la plupart des capteurs et des petits afficheurs (type instrument de bord).
Si la plupart des marques (Lowrance, Furuno, Garmin, Maretron…) ont joué le jeu du standard Micro-C, d’autres comme Simrad ou Raymarine s’entêtent dans des formats de connectiques propriétaires : Simnet chez Simrad, SeatalkNG chez Raymarine. Si la connectique est propriétaire, le langage reste cependant compatible, et des adaptateurs permettent de basculer d’un réseau NMEA2000 Micro-C vers un réseau Simrad Simnet ou Raymarine SeatalkNG.
Une large gamme de capteurs est déjà disponible. Mais nous n’en sommes réellement qu’au début de la commercialisation du système. A la date de ce billet, Garmin propose par exemple sur ces MFDs (écrans multifonction) des écrans de gestion moteur, sans proposer d’interface ?! Chez Lowrance celles-ci sont disponibles pour les moteurs Yamaha, Evinrude et Suzuki. Mais Lowrance fait figure de meilleur élève avec une large gamme d’accessoires certifiés et des écrans compatibles depuis 2007, et une gestion de loin la plus facile et la plus paramétrable du réseau NMEA2000. Maretron n’est pas en reste, visant une clientèle plutôt Yacht, cette marque américaine à mis au point différents capteurs, interfaces et afficheurs.
Notre banc de démo du magasin de Boulogne Billancourt avait besoin d’une mise à jour. A l’occasion de son article dans le numéro 457 de mars, le journaliste de Voiles et Voiliers voulait être de la partie pour cette mise en chantier, nous avons joué avec tout ce que nous pouvions sortir en NMEA2000.
Il faut commencer par mettre en place la dorsale, notre Lowrance LCX-37 sera le premier connecté. L’avantage des appareils Lowrance est la possibilité d’afficher la liste des périphériques connectés au réseau NMEA2000, et la liste des informations qu’ils délivrent avec leur valeur en temps réel. Mais ca n’est pas tout, car LOWRANCE propose également de créer des pages totalement personnalisées, composées de cadrans ou d’indications numériques à la taille de votre choix, disposé selon vos besoins et d’y associer n’importe quelles informations disponibles sur le bus : température de l’eau, de l’air, de l’huile moteur, de la cabine de droite, de celle de gauche… n’importe laquelle. Lowrance est de loin la marque proposant le plus de souplesse sur ce point.
Notre dorsale est en place, comme notre « bateau » ne fait qu’un mètre de long, j’ai choisi d’embrocher les connecteurs en T les uns dans les autres. On rajoutera un connecteur en T pour l’alimentation des capteurs, un connecteur en T pour brancher la girouette anémomètre Simrad, un autre pour l’afficheur Garmin, un autre pour le capteur tri-fonctions Furuno/Airmar (profondeur, vitesse, température) et ainsi de suite. Une fois branché, l’info est immédiatement disponible sur le bus. En cas de changement d’un capteur défectueux, c’est quelques minutes, et ceci sans affecter le reste de l’installation puisque tout continue de fonctionner.
L’ergonomie dépend beaucoup de l’appareil utilisé. On peut regretter de ne pas retrouver la liste des capteurs et des infos du réseau sur toutes les marques. Chez Raymarine et chez Garmin, en guise de liste, c’est 4 ou 5 chapitres principaux que nous propose la marque : Moteur, Environnement, Voile, Navigation. Et sous chacun de ces chapitres on retrouvera des informations. Par exemple sous le chapitre Navigation on trouvera la vitesse surface, la température de l’eau. Ok, mais dans le cas ou je dispose de plusieurs capteurs pouvant délivrer ces informations? Malheureusement on touche ici au limite du systeme, car ca n’est pas Raymarine et encore moins Garmin qui vous aidera à savoir quel capteur sera pris en compte en premier.
Cela n’enlève rien aux avantages du NMEA2000, les fabricants l’ont bien compris. Les installations complexes nécessitent plus d’attention cela à toujours été vrai, mais l’évolutivité est là. L’écran MFD (qui fait tout) est compatible NMEA2000. Les nouveaux pilotes automatiques sont compatibles NMEA2000, exploitant toutes les données possibles circulant sur le bus (compas, gyro, angle de barre, vent, GPS). Les AIS sortent aujourd’hui compatibles NMEA2000 avec le Navico NAIS300 et le Raymarine AIS500. Les moteurs sont presque tous équipés de sortie NMEA2000 (sauf Mercury qui a choisi un langage propriétaire le SmartCraft, et Honda qui n’est toujours pas certifié NMEA2000). La prise diagnostique autrefois interdite au propriétaire est aujourd’hui une fenêtre sur votre moteur que les motoristes n’hésite pas à mettre en avant, fournissant des cadrans Lowrance NMEA2000 en guise de compte tour, et bien plus encore. La marque Maretron a pris un peu d’avance et propose tout un tas d’interface récupérant les informations pour des moteurs Inboard (Yanmar, Cummins, Caterpilar, Volvo etc.), mais ils sont également les premiers à avoir sorti une interface PC NMEA2000 capable de convertir en NMEA0183. Un vrai besoin car aucun logiciel de navigation ne permet actuellement le traitement du NMEA2000 en natif.
Une infinité de possibilités et cela commence maintenant ! Maretron avec son logiciel et quelques capteurs permet par exemple de consulter depuis n’importe quel PC connecté à internet, tous les capteurs NMEA2000 de son bateau, alors qu’il attend à sa place de port, également connecté à internet via le WiFi du port. Ainsi on peu voir le niveau de carburant, voir le niveau d’eau, voir si la lumière est allumé et l’éteindre, ou si la cale est pleine et s’il faut lancer la pompe. Quand tout cela est proposé sur un écran tactile de 47’’ comme au dernier salon d’Amsterdam c’est impressionnant !
Plus concret, prenons l’exemple d’une configuration double poste pour un voilier. Le capteur vent tète de mat est connecté à la dorsale au niveau du mat, ainsi qu’un capteur trifonction vitesse, T°/profondeur. La dorsale emmène l’information jusqu’à la table à carte ou elle sera distribuée au GPS lecteur de carte pour lui permettre d’afficher les informations, ce même GPS enverra également la position à la VHF connectée. Toutes ces informations repartent vers le cockpit pour être affiché sur un petit afficheur type instrument de bord. Le calculateur du pilote pourra également être connecté à l’ensemble, et renvoyé sur l’afficheur les infos d’angle de barre, et de compas magnétique relevé par les capteurs du pilote. Etc etc.
Tout est donc possible. Il faut seulement espérer que le cap suivi par les grands fabricant reste le bon, et que l’ouverture de ce réseau reste la plus large possible. On surveillera particulièrement ceux pour qui ca n’est pas une habitude, Raymarine et Simrad, avec la sortie des nouveaux matériels chez ces deux marque au début 2010. Jusqu’à présent, d’après les tests que j’ai pu réaliser, les capteurs existant sous l’ère NMEA0183 (vent, profondeur, compas) sont aujourd’hui inter-compatibles entre les marques en NMEA2000. Les nouveaux capteurs qui n’avaient pas de phrase NMEA0183 (jauge, débitmètre), sont parfois plus récalcitrant, mais les mises à jour logiciel continuent, et chacune apporte ses corrections de phrases NMEA2000.
++

Et les illustrations :
Le site du NMEA : www.nmea.org
Et la liste des appareils et marques certifiés :
http://www.nmea.org/content/nmea_standards/certified_produ.asp
Voici un écran LOWRANCE (gamme 2008) avec quelques compteurs créés par mes soins, j'ai vu ceux de la gamme Lowrance HDS (2009) ça sera bien plus joli, espérons que nous n'y perdrons pas en possibilité, réponse bientôt.
Voici un écran LOWRANCE (gamme 2008) indiquant le listing des périphériques NMEA2000 connectés au réseau
Et ici un écran LOWRANCE (gamme 2008) indiquant les informations délivrées par un capteur NMEA2000 du réseau et les valeurs
Voici une prise (de gauche a droite) Micro-C, une prise Simrad Simnet et une prise Raymarine SeatalkNG.
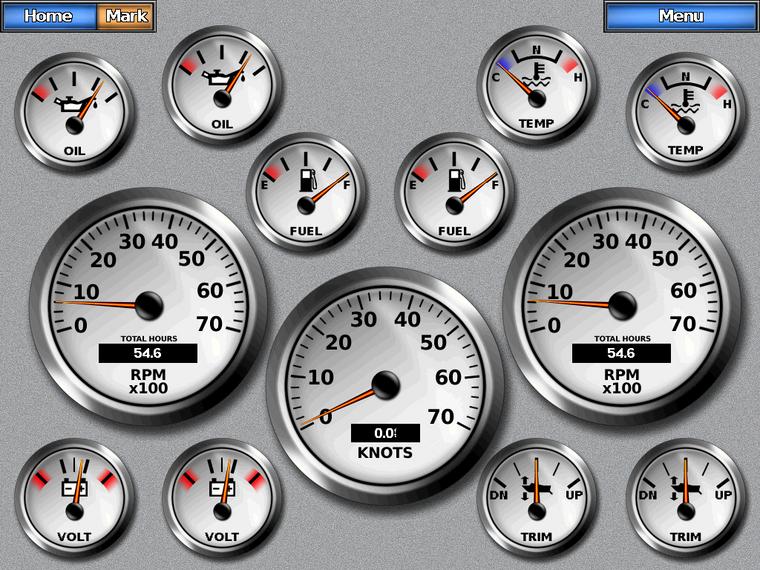
Voici 2 écrans de GARMIN GPSMAP série 5000 avec les infos moteurs, dans le cas d'une connexion avec votre moteur 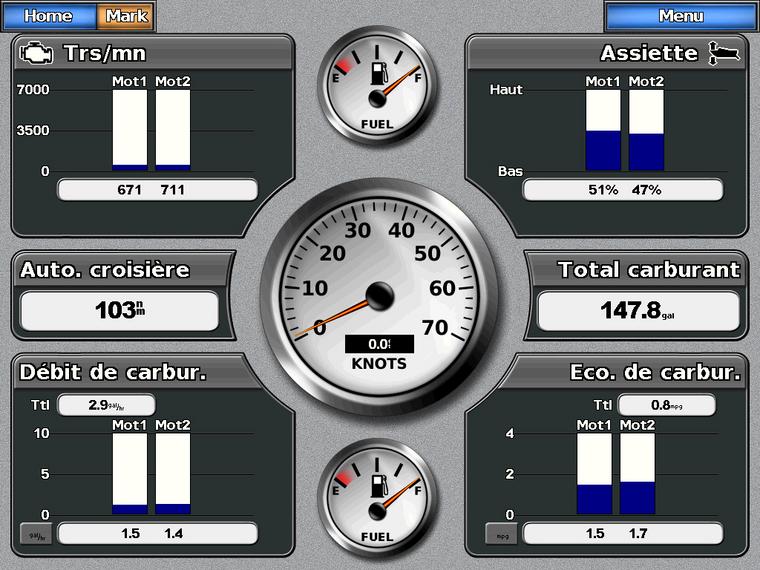
Vu sur un forum américain une installation en cours d'afficheur LOWRANCE LMF sur un bi-moteur Evinrude 
Et le bazar d'une installation mobile, le "making off" de l'article Voiles et Voiliers : 

++

interressant, merci
a++
jéjé


Sacré Boulot :applaudit:
Jusqu'à maintenant, je ne m' intéressais que de loin à cette "jungle" que représentait pour moi les normes de communication entre les différents appareils electroniques.
Grace à cette belle oeuvre de vulgarisation ( encore bravo ! :super: :clapclap: ) les choses me sont desormais bien plus claires
J' ai quand meme une question ...
si j' ai bien compris l' alimentation en courant se fait par le " bus " .
Autrement dit, si jamais celle-ci est defaillante, est-ce l' integralité de tout le systeme qui est "dans le noir" ?
Comment faire pour qu' un systeme "dégradé" ( c' est à dire ne reprenant qu' une partie des infos recupérées ) puisse prendre le relais en cas de souci ?
L' electronique, c' est comme tout , un métier ( et quelquefois une passion :wink: )
Merci pour ton exposé :veneration: :ola: :veneration:
Merci à tous ;)
L'avantage de ce système en réseau c'est aussi qu'on peut multiplier alimentation (sous certaines conditions d'isolation les unes des autres) capteurs et afficheurs. Il suffit de rajouter un T avec une alim ou le capteur en question.
Si l'alim saute effectivement tout les capteurs et petits afficheurs sont HS. Si on passe sur la seconde alim tout se reconnecte.
Si un capteur est HS en cours d'utilisation, peu importe le reste continue de fonctionner et si on a un "spare" en ligne sur le bus, il suffit d'indiquer que le second capteur devient source principale de l'information.
++
Devant l'étrangeté du système de sélection des informations NMEA2000 / SeatalkNG Raymarine, qui consiste à sélectionner une information non pas en fonction des capteurs mais en fonction de l'information elle même, j'ai contacté Raymarine France pour avoir plus d'infos.
Voila ce qu'il faut surveiller et voila ou Raymarine doit s'améliorer.
Si j'ai 2 capteurs vent sur mon réseau NMEA2000, avec un appareil LOWRANCE, aucun probleme, je choisi l'information du capteur qui m'intéresse.
Avec un appareil Raymarine, ça n'est pas possible, le réseau SealtalkNG "ne peut" accueillir plusieurs capteurs vent, c'est possible physiquement, mais un seul sera pris en compte par l'afficheur Raymarine. Car pour avoir l'information de vitesse du vent, il faudra sélectionner dans le chapitre "Voile" l'information "Vitesse du vent", sans savoir de quel capteur elle provient.
Ce capteur n'a que peut d'intérêt à être doublé (c'est pour l'exemple), mais s'il s'agit d'une antenne GPS, ou d'un capteur vitesse ou de température... ça peut avoir un intérêt bien plus grand.
++








